前言
此篇博客系补档,写于2023/11/04至2023/11/14,最后更新于2023/11/14 16:23,曾发布于知乎。
朴素字符串匹配
朴素字符串匹配算法(Naive-String-Matcher)是通过一个循环找到所有有效偏移,该循环对n-m+1个可能的s值进行检测,看是否满足条件$P[1..m]=T[s+1..s+m]$。
| |
由于不需要预处理,在最坏情况下的时间复杂度为O((n-m+1)m)(对偏移s的n-m+1个可能值比较,或者说对前n-m+1的每个字符做一次长度为m的匹配)。 KMP算法在最坏情况下比朴素算法好得多,这种匹配算法效率不高,因为当其他无效的s值存在时,它也只关心一个有效的s值,而完全忽略了检测无效s值时获得的文本信息(这种信息可能非常有用)。
利用有限自动机进行字符串匹配
很多字符串匹配算法都要建立一个有限自动机,它时一个处理信息的简单机器,通过对文本字符串T进行扫描,找出模式P的所有出现位置。
有限自动机
一个有限自动机$M$是一个五元组( $Q$ , $q$0 , $A$ , $\sum$ , $\delta$ ),其中:
- $Q$是状态的有限集合
- $q$0$\in$Q是初始状态
- $A$$\subseteq$Q是一个特殊的接受状态集合
- $\sum$是有限输入字母表
- $\delta$是一个从Q$\times$$\sum$到Q的函数,称为$M$的转移函数 有限自动机开始于状态$q$0,每次读入输入字符串的一个字符。如果有限自动机在状态q时读入了字符a,则它从状态q变为状态$\delta( q , a )$(进行了一次转移)。每当其当前状态$q$属于$A$时,就表明自动机M接受了迄今为止所读入的字符串,没有被接受的输入称为被拒绝的输入。
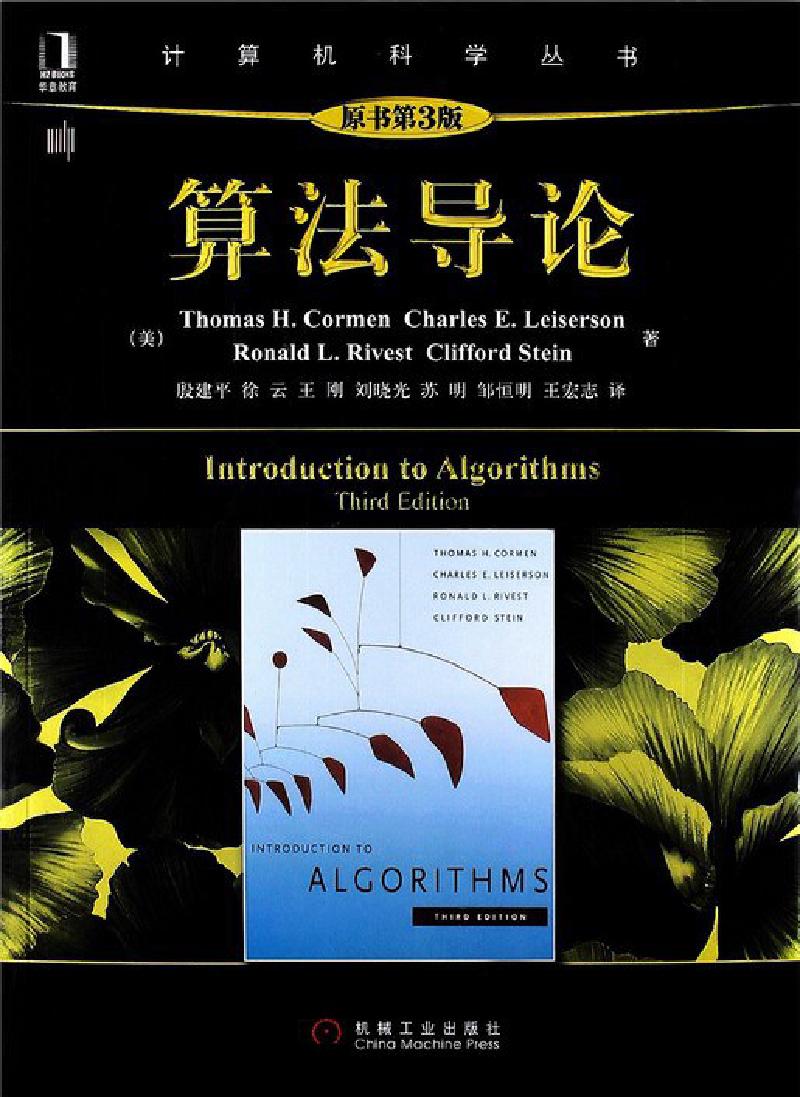
用一个简单的两状态自动机说明
该自动机拥有状态集$Q=${0,1},开始状态$q$0=0,输入字母表$\sum$={a,b}。 (a)用表格表示状态函数$\delta$,(b)是一个等价的状态转换图。 状态1是唯一的被接受状态,有向边代表着转换(例如从状态1到状态0的b边表示$\delta(1,b)=0$。显然,这个自动机接受以奇数个a结尾的字符串。或者说,一个 字符串$x$被接受当且仅当$x=yz$,其中$y=\varepsilon$或$y$以b结尾,并且$z=a$k(k为奇数)。 例如,对于输入abaaa,包括初始状态,这个自动机输入状态序列为$<0,1,0,1,0,1>$,因而它接受这个输入;对于输入abbaa,自动机输入状态序列为$<0,1,0,0,1,0>$,因而它拒绝这个输入。
有限自动机$M$引入一个函数$\phi$,称为终态函数,它是从$\sum*$到$Q$的函数,满足$\phi(\omega)$是$M$在扫描字符串$\omega$后终止时的状态。因此,当且仅当$\phi(\omega)\in A$时,$M$接受字符串$\omega$。我们可以用转移函数递归定义$\phi$: $\phi(\varepsilon)=q$0 $\phi(\omega a)=\delta(\phi(\omega),a), \omega\in\sum*,a\in\sum$
字符串匹配自动机
对于一个给定的模式P,我们可以在预处理阶段构造出一个字符串匹配自动机,根据模式构造出相应的自动机后,再利用它来搜寻文本字符串。
定义一个辅助函数$\sigma$,称为对应模式串的后缀函数。 满足$\sigma(x)$是$x$的后缀与对应模式串P的前缀的最大公共长度: $\sigma(x)=$max{k:Pk$\sqsupset$ $x$} 如对于模式串P=ab,有$\sigma$($\varepsilon$)=0,$\sigma$(ccaca)=1,$\sigma$(ccab)=2
给定模式$P[1..m]$,其相应的字符串匹配自动机定义如下:
- 状态集合$Q$为{0,1,…,m}。开始状态$q$0是0状态,并且只有状态m是唯一被接受的状态
- 对任意的状态$q$和字符$a$,转移函数$\delta$定义为$\delta(q,a)$=$\sigma$$($Pq$a$$)$ 我们定义$\delta(q,a)$=$\sigma$$($Pq$a$$)$,目的是记录已得到的与模式P匹配的文本呢字符串T的最长前缀。考虑最近一次扫描T的字符,为了使T的一个子串能够和P的某些前缀Pj匹配,前缀Pj必须是Ti的一个后缀。如果自动机处于状态$q$并且读入下一个字符$T[i+1]=a$,那么我们希望这个转换能够指向Tia的后缀状态,它对应着P的最长前缀,即$\sigma$(Tia)。由于Pq是P的最长前缀,也就是Ti的一个后缀,那么P的最长前缀也就是Tia的一个后缀,即$\sigma$$($Tia$)$=$\sigma$$($Pqa$)$(由后缀函数递归引理证明,此处省略)。因此,当自动机处在状态$q$时,我们希望这个在字符a上的转移函数能使自动机转移到状态$\sigma$$($Pqa$)$。
考虑两种情况:
- $a=P[q+1]$,使得字符a继续匹配模式,那么状态前进,即$\delta(q,a)=q+1$
- $a\ne P[q+1]$,使得字符a不能继续匹配模式,那么回溯到一个更小的字串,它是**P的前缀同时也是Ti的后缀。
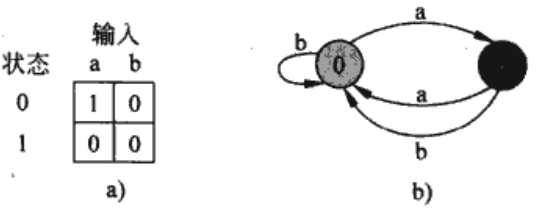
在这个例子中,状态0是初始状态,状态7是仅有的接受状态。 图中的自动机有$\delta(5,c)=6$,说明其是第一种情况,匹配继续进行。 但是,如果自动机在$q=5$状态时读到b,那么Pqb=ababab,并且P的最长前缀也是ababab的后缀P4=abab,因此转移到状态$q=5$。
| |
从有限自动机的简单循环结构可以看出,对于一个长度为n的文本字符串,它的匹配时间为$O(n)$。但是,这一匹配时间没有包括计算转移函数$\delta$所需要的预处理时间。
定理:如果$\phi$是字符串匹配自动机关于给定模式P的终态函数,T[1..n]是自动机的输入文本,则对i=0,1,…,n,有$\phi($Ti$)$=$\sigma($Ti$)$
| |
这个过程根据定理直接计算$\delta(q,a)$,在嵌套循环中考察所有的状态$q$和字符a。第4~8行把$\delta(q,a)$置为满足Pk$\sqsupset$Pqa的最大的k。代码从k的最大可能值$min(m, q+1)$开始,随着过程的执行,k递减至Pk$\sqsupset$Pqa,这种情况必然会发生,因为P0=$\varepsilon$是每个字符串的一个后缀。
KMP算法(Knuth-Morris-Pratt A.)
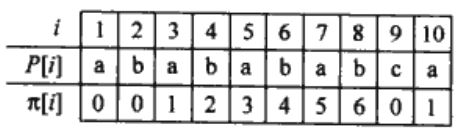
这个算法无需计算转移函数$\delta$,匹配时间为$O(n)$,只用到辅助函数$\pi$,它在O(m)时间内根据模式预先计算出来,并且存储在数组$\pi$$[1..m]$中。数组$\pi$使得我们可以按需要有效地计算转移函数$\delta$。粗略地说,对任意状态q=0,1,…,m和任意字符$a\in\sum$,$\pi[q]$的值包含了与a无关但在计算$\delta(q,a)$时需要的信息。由于数组$\pi$只有m个元素,而$\delta$有$O(m\sum)$个值,所以通过预先计算$\pi$而不是$\delta$,可以使计算时间减少一个$\sum$因子。
关于模式的前缀函数
模式的前缀函数$\pi$包含模式与其自身的偏移进行匹配的信息,这些信息可用在朴素字符串匹配算法中避免对无用偏移的检测,也可以避免在字符串匹配自动机中对整个转移函数$\delta$的预先计算。
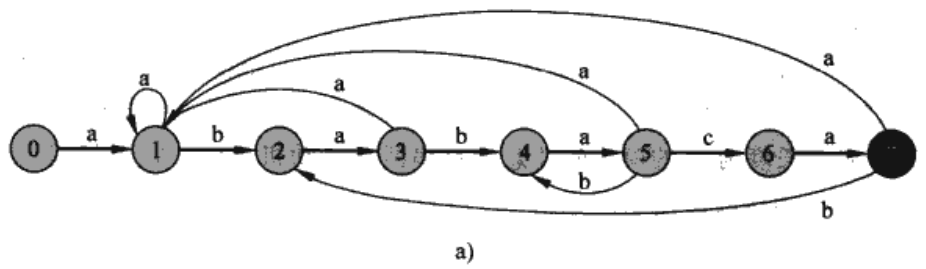
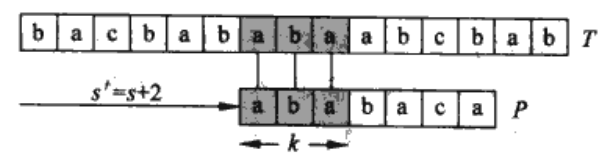
在这个用模式串P=ababaca匹配文本字符串T的例子中,q=5个字符已经匹配成功,但模式的第6个字符不能匹配。已知的这q个文本字符使我们能够立即确定某些偏移是无效的,如s+1必然是无效的,因为文本字符已知不能与模式的第一个字符a匹配,但能与模式的第二个字符b匹配。因此,如下图所示的$s’=s+2$的偏移显然比s+1的偏移更有效率。
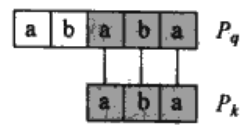
在这里,我们发现P3是能构成P5真后缀的P的最长前缀(如下图所示),这些信息被预先计算出来,并用数组$\pi$表示,即$\pi[5]=3$。我们可以归纳得到,在偏移s有q个字符成功匹配时,则下一个可能有效的偏移为$s’=s+(q-\pi[q])$。
接下来我们来讨论$\pi[q]$从何而来。假设模式字符$P[1..q]$与文本字符$T[s+1..s+q]$匹配,$s’$是最小的偏移量,$s’>s$,那么对某些k<q,满足$P[q..k]=T[s’+1..s’+k]$的最小偏移$s’$是多少(其中$s’+k=s+q$)? 换句话说,已知Pq$\sqsupset$Ts+q,我们希望Pq的最长真前缀Pk也是Ts+q的后缀。由于$s’+k=s+q$,那么找到的最小偏移$s’$等价于找到最长前缀的长度k。我们把P前缀长度范围内的差值$q-k$加入到偏移s中,用于找到新的偏移$s’$,使得$s’=s+(q-k)$。在最好情况下$k=0$,因此$s’=s+q$。总之,在任何情况下,对于新的偏移$s’$,无需把P的前k个字符与T中相应的字符进行比较,因为$P[q..k]=T[s’+1..s’+k]$已经保证它们肯定匹配。
我们可以用模式与其自身进行比较来预先计算出这些必要的信息,如图所示:
$\pi$存储的是模式串P的最长公共前后缀。例如,$\pi[5]=3,\pi[3]=1,\pi[1]=0$,通过迭代可以得到$\pi[\pi[\pi[5]]]=0,\pi[\pi[5]]=1$,可以用$\pi*[5]={3,1,0}$表示。那么,当k为3或1或0时,都会出现偏移$s’$满足P的某前缀与Pq的后缀匹配,实现更有效率的偏移。
| |
KMP算法通过运用$\pi$而不是$\delta$,可将对模式进行预处理的时间由$O(m \sum)$减为$O(m)$,同时保持实际的匹配时间为$O(n)$(暂时省略证明,以后来补罢)。