Reference
教程 | Triton 中文站
Tutorials — Triton documentation
并行编程语言(Triton & 九齿) - 2024 冬季大模型与人工智能系统训练营
Vector Addition
Compute Kernel
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
| import torch
import triton
import triton.language as tl
DEVICE = torch.device("cuda:0")
@triton.jit
def add_kernel(x_ptr, # *Pointer* to first input vector.
y_ptr, # *Pointer* to second input vector.
output_ptr, # *Pointer* to output vector.
n_elements, # Size of the vector.
BLOCK_SIZE: tl.constexpr, # Number of elements each program should process.
# NOTE: `constexpr` so it can be used as a shape value.
):
pid = tl.program_id(axis=0) # We use a 1D launch grid so axis is 0.
block_start = pid * BLOCK_SIZE # Offsets is a list of pointers
offsets = block_start + tl.arange(0, BLOCK_SIZE)
mask = offsets < n_elements
# Load x and y from DRAM
x = tl.load(x_ptr + offsets, mask=mask)
y = tl.load(y_ptr + offsets, mask=mask)
output = x + y
# Write x + y back to DRAM.
tl.store(output_ptr + offsets, output, mask=mask)
|
编译遇到的第一个报错是AttributeError: 'CudaDriver' object has no attribute 'get_active_torch_device',在issue#5388下找到了原因和解决方案,DEVICE = triton.runtime.driver.active.get_active_torch_device()似乎对应了旧本版本,用DEVICE = torch.device("cuda:0")可以暂缓燃眉之急。
kernel的实现思路是简单的:
对于输入(input_x, input_y, output, n, BLOCK_SIZE),获取programd_id,通过pid * BLOCK_SIZE计算分块索引,通过block_start + tl.arange(0, BLOCK_SIZE)确定每个元素的索引
确定mask,防止边界溢出
加载输入元素,实现向量加法,最后写回DRAM
接下来需要一个合适的辅助函数,负责生成output张量和创建合适的layout
1
2
3
4
5
6
7
8
9
| def add(x: torch.Tensor, y: torch.Tensor):
output = torch.empty_like(x) # preallocate the output
assert x.device == DEVICE and y.device == DEVICE and output.device == DEVICE
n_elements = output.numel()
grid = lambda meta: (triton.cdiv(n_elements, meta['BLOCK_SIZE']), )
add_kernel[grid](x, y, output, n_elements, BLOCK_SIZE=1024)
# We return a handle to z but, since `torch.cuda.synchronize()` hasn't been called, the kernel is still
# running asynchronously at this point.
return output
|
核心只有两行代码,
grid = lambda meta: (triton.cdiv(n_elements, meta['BLOCK_SIZE']), )定义一个grid匿名函数,用triton.cdiv计算$\lceil\frac{n}{BLOCKSIZE}\rceil$
add_kernel[grid](x, y, output, n_elements, BLOCK_SIZE=1024)调用grid(meta)来确定网格大小并启动GPU线程块,并将(x, y, output, n_elements, BLOCK_SIZE=1024)传递给kernel
1
2
3
4
5
6
7
8
9
10
| torch.manual_seed(0)
size = 984320000
x = torch.rand(size, device=DEVICE)
y = torch.rand(size, device=DEVICE)
output_torch = x + y
output_triton = add(x, y)
print(output_torch)
print(output_triton)
print(f'The maximum difference between torch and triton is '
f'{torch.max(torch.abs(output_torch - output_triton))}')
|
Benchmark
这个设计真的非常喜欢,不用费事去写一些benchmark测试代码了!
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
| @triton.testing.perf_report(
triton.testing.Benchmark(
x_names=['size'], # Argument names to use as an x-axis for the plot. 用作绘图 x 轴的参数名称。
x_vals=[2**i for i in range(12, 28, 1)], # Different possible values for `x_name`. `x_name` 的不同可能值。
x_log=True, # x axis is logarithmic. x 轴为对数。
line_arg='provider', # Argument name whose value corresponds to a different line in the plot. 参数名称,其值对应于绘图中的不同线条。
line_vals=['triton', 'torch'], # Possible values for `line_arg`. `line_arg` 的可能值。
line_names=['Triton', 'Torch'], # Label name for the lines. 线条的标签名称。
styles=[('blue', '-'), ('green', '-')], # Line styles. 线条样式。
ylabel='GB/s', # Label name for the y-axis. y 轴标签名称。
plot_name='vector-add-performance', # Name for the plot. Used also as a file name for saving the plot. 绘图名称。也用作保存绘图的文件名。
args={}, # Values for function arguments not in `x_names` and `y_name`. 不在 `x_names` 和 `y_name` 中的函数参数值。
))
def benchmark(size, provider):
x = torch.rand(size, device='cuda', dtype=torch.float32)
y = torch.rand(size, device='cuda', dtype=torch.float32)
quantiles = [0.5, 0.2, 0.8]
if provider == 'torch':
ms, min_ms, max_ms = triton.testing.do_bench(lambda: x + y, quantiles=quantiles)
if provider == 'triton':
ms, min_ms, max_ms = triton.testing.do_bench(lambda: add(x, y), quantiles=quantiles)
gbps = lambda ms: 3 * x.numel() * x.element_size() / ms * 1e-6
return gbps(ms), gbps(max_ms), gbps(min_ms)
benchmark.run(print_data=True, show_plots=True, save_path='./')
|
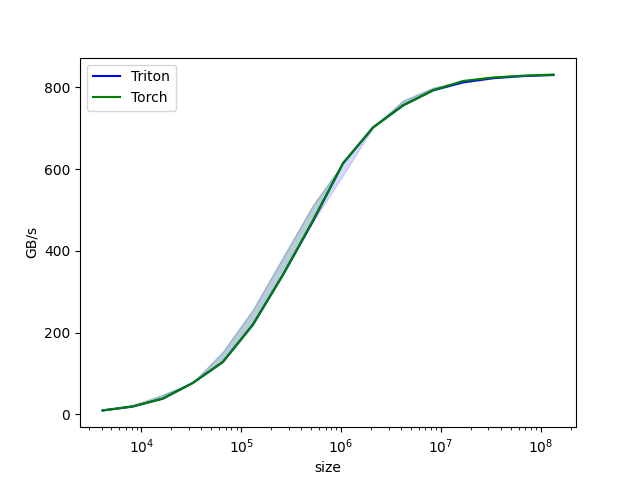
以下是单卡Tesla V100-PCIE-32GB的benchmark结果,可以看出和Torch还是有一些差距的
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
| vector-add-performance:
size Triton Torch
0 4096.0 9.600000 9.600000
1 8192.0 19.200000 19.200000
2 16384.0 38.400001 38.400001
3 32768.0 76.800002 76.800002
4 65536.0 127.999995 127.999995
5 131072.0 219.428568 219.428568
6 262144.0 341.333321 341.333321
7 524288.0 472.615390 474.898540
8 1048576.0 614.400016 614.400016
9 2097152.0 702.171410 702.171410
10 4194304.0 756.184613 756.184613
11 8388608.0 792.974002 793.173993
12 16777216.0 812.429770 815.800825
13 33554432.0 822.627612 824.352211
14 67108864.0 827.823144 828.695462
15 134217728.0 830.445624 831.344043
|
Fused Softmax
Naive Softmax
$$softmax(z_{i})=\frac{e^{z_{i}}}{\Sigma_{j=1}^{n}e^{z_{j}}}=\frac{exp(z_{i})}{\Sigma_{j=1}^{n}exp(z_{j})}$$ 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| def naive_softmax(x):
"""Compute row-wise softmax of X using native pytorch
"""
# read MN elements ; write M elements
x_max = x.max(dim=1)[0]
# read MN + M elements ; write MN elements
z = x - x_max[:, None]
# read MN elements ; write MN elements
numerator = torch.exp(z)
# read MN elements ; write M elements
denominator = numerator.sum(dim=1)
# read MN + M elements ; write MN elements
ret = numerator / denominator[:, None]
# in total: read 5MN + 2M elements ; wrote 3MN + 2M elements
return ret
|
$$softmax(x)=softmax(x+c)$$
对于naive的softmax实现,需要从DRAM中读取$5MN+2M$个元素,并写回$3MN+2M$个元素,IO共需要$8MN+4M$个单位,显然是不理想的。理想情况下,只读写一次并完成所有计算,因此可以得到理想加速约为4倍($\frac{8MN+4M}{2MN}$)。
Compute Kernel
softmax kernel需要补充的内容都写在注释里了:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
| @triton.jit
def softmax_kernel(output_ptr, input_ptr, input_row_stride, output_row_stride, n_rows, n_cols, BLOCK_SIZE: tl.constexpr,
num_stages: tl.constexpr):
# kernel思路 : 让多个program并行处理不同的行
row_start = tl.program_id(0) # program ID
row_step = tl.num_programs(0) # program 数量
# 遍历每一行, tl.range(..)行索引list
## 线程0处理:[0, row_step, 2 * row_step, ...]
## 线程1处理:[1, 1 + row_step, 1 + 2 * row_step, ...]
## 线程2处理:[2, 2 + row_step, 2 + 2 * row_step, ...]
## ... **实现了不同program处理不同row**
for row_idx in tl.range(row_start, n_rows, row_step, num_stages=num_stages):
# row_start_ptr指向当前行的首个元素
row_start_ptr = input_ptr + row_idx * input_row_stride
# 计算列索引
col_offsets = tl.arange(0, BLOCK_SIZE) # 列偏移, 生成[0, BLOCK_SIZE - 1]
input_ptrs = row_start_ptr + col_offsets # 当前行首 + 列偏移
# 计算mask
mask = col_offsets < n_cols # 注意是用列偏移和列数生成的mask
row = tl.load(input_ptrs, mask=mask, other=-float('inf')) # 根据mask读取内存, 超出n_cols的部分填充为-∞
row_minus_max = row - tl.max(row, axis=0)
# softmax
numerator = tl.exp(row_minus_max)
denominator = tl.sum(numerator, axis=0)
softmax_output = numerator / denominator
# Write back output to DRAM
output_row_start_ptr = output_ptr + row_idx * output_row_stride # 计算输出索引
output_ptrs = output_row_start_ptr + col_offsets # 计算输出内存地址
tl.store(output_ptrs, softmax_output, mask=mask)
|
认真看完源码后,会发现softmax kernel的实现思路并不难,每个program处理输入矩阵的一组行(按program数量跨步处理),执行完softmax操作后写回DRAM。
Note: Triton的一个重要限制是BLOCK_SIZE必须是$2^n$的元素
同样,我们需要一个辅助函数。在此之前,triton.runtime.driver.active.utils.get_device_properties(torch.cuda.current_device())非常有用,能够帮助我们收集必要的计算卡硬件信息。
1
2
3
4
5
6
7
8
| device = torch.cuda.current_device()
properties = driver.active.utils.get_device_properties(device)
NUM_SM = properties["multiprocessor_count"]
NUM_REGS = properties["max_num_regs"]
SIZE_SMEM = properties["max_shared_mem"]
WARP_SIZE = properties["warpSize"]
target = triton.runtime.driver.active.get_current_target()
kernels = {}
|
Tesla V100-PCIE-32GB的输出如下:
1
2
3
4
5
6
7
8
9
| {
'max_shared_mem': 98304, # 共享内存
'max_num_regs': 65536, # 最大寄存器数
'multiprocessor_count': 80, # SM 数量
'warpSize': 32, # WARP 大小
'sm_clock_rate': 1380000, # SM 频率 (Hz)
'mem_clock_rate': 877000, # 内存频率 (Hz)
'mem_bus_width': 4096 # 内存总线宽度 (bit)
}
|
辅助函数如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
| def softmax(x):
n_rows, n_cols = x.shape
# BLOCK_SIZE是大于矩阵列数的最小二次幂
BLOCK_SIZE = triton.next_power_of_2(n_cols)
num_warps = 8
# 如果 GPU 共享内存(SMEM)足够大(>200KB),就用 4 个流水线阶段,否则用 2 个
num_stages = 4 if SIZE_SMEM > 200000 else 2
# Allocate output
y = torch.empty_like(x)
# pre-compile kernel to get register usage and compute thread occupancy.
# 预编译内核以获取寄存器使用情况并计算线程占用情况。
kernel, num_programs = kernels.get(BLOCK_SIZE, (None, 0))
if kernel is None:
kernel = softmax_kernel.warmup(y, x, x.stride(0), y.stride(0), n_rows, n_cols, BLOCK_SIZE=BLOCK_SIZE,
num_stages=num_stages, num_warps=num_warps, grid=(1, ))
kernel._init_handles()
n_regs = kernel.n_regs
size_smem = kernel.metadata.shared
occupancy = NUM_REGS // (n_regs * WARP_SIZE * num_warps)
occupancy = min(occupancy, SIZE_SMEM // size_smem)
num_programs = NUM_SM * occupancy
kernels[BLOCK_SIZE] = (kernel, num_programs)
num_programs = min(num_programs, n_rows)
# Create a number of persistent programs.
# 创建一些持久化程序。
kernel[(num_programs, 1, 1)](
y,
x,
x.stride(0),
y.stride(0),
n_rows,
n_cols,
)
return y
|
在预编译kernel前需要确定BLOCK_SIZE大小、warp数量、流水线阶段并分配输出tensor空间。更多的流水线阶段可以提高并行效率,但会消耗更多的shared memory。
在预编译阶段,softmax_kernel.warmup(...)预编译softmax kernel,用于获取寄存器使用情况、shared memory使用量、线程占用率,并通过kernel._init_handles()初始化kernel的CUDA句柄。最终计算num_programs(SM数量×线程占用率)并保证安全运行kernel。
Why Fused Softmax?
读完Fused Softmax Tutorial的代码后,我不太理解为什么这个kernel被成为融合Softmax(Fused Softmax),为什么将原本$\Theta(8MN+4M)$的IO开销缩减到了一次读写,为什么能够比PyTorch的实现更快(明明softmax的步骤是一样的)。
除了用到了pipelining优化了计算流程,主要是在PyTorch传统softmax实现中,涉及多个kernel启动并在全局现存(global memory)之间频繁读写数据,导致了额外的内存访问开销和kernel启动开销(计算最大值,计算指数函数,行归一化,输出)。而用Triton写的Fused Softmax kernel编写了一个自定义CUDA kernel,在单个kernel内部完成了所有计算的步骤,也可以更好地利用shared memory和registers。
